

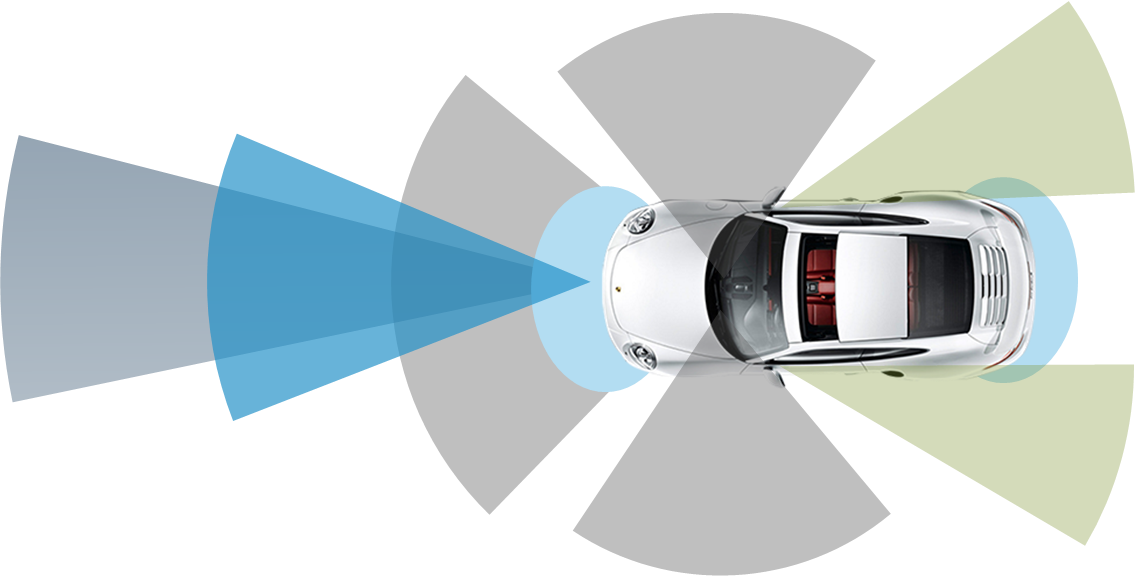


多传感器融合感知技术
多传感器融合感知技术,通过多传感器布局配置覆盖车身周围的关键区域,采集环境关键信息进行知识提取,检测识别可行驶区域、车道线、交通标志、交通灯、车辆、行人等障碍物,预测车辆、行人等的位置、运动状态。多传感器融合可显著提高系统的冗余度和容错性,从而保证决策的快速性和正确性,是智能驾驶及自动驾驶的核心技术。
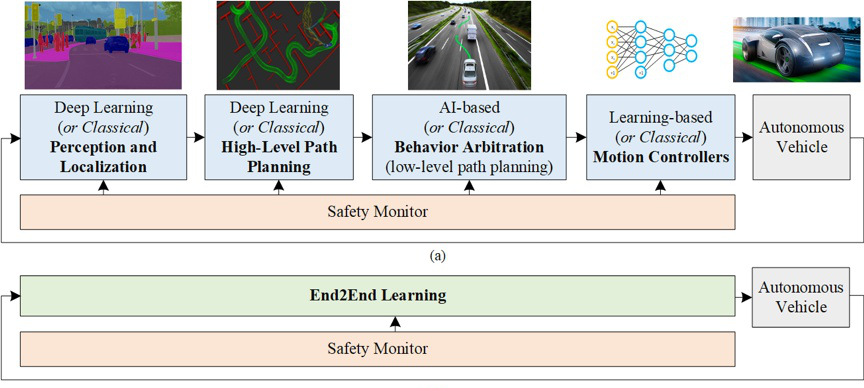
自动驾驶-感知与决策算法
自动驾驶汽车由感知、决策和执行子系统构成,自动驾驶技术涉及环境感知、决策规划、控制执行、V2X 通信等关键技术。得益于传感器技术、深度学习、人工智能技术的发展,汽车通过处理来自不同车载传感器的信息(如摄像头、雷达、激光雷达、超声波传感器、GPS装置、惯性传感器),更好地理解周围环境,进行驾驶决策,从而实现L4和L5级别的自动驾驶。
嵌入式系统开发
车载系统感知与控制
工业系统检测与控制
图像识别与检测
核心技术