

智能驾驶感知平台
RK IDP(Intelligent driving platform)智能驾驶感知平台,集成前视摄像头、360全景摄像头、16线激光雷达、77GHz毫米波雷达、惯性导航系统等感知传感器,基于ubuntu16.04 ROS-kinetic系统开发多传感器融合算法软件,可靠实现定位、地图构建、周边障碍物识别和跟踪等功能。
激光雷达和摄像头联合外参标定
距离精度:<±2cm(典型值)
测距范围:0.2m - 150m(目标反射20%)
垂直视场角:±15°
垂直分辨率:2°
水平视场角:360°
水平分辨率:0.09°- 0.36°(5 - 20Hz)
雷达点云数据解析
点云数据 300,000pts/s
数据处理频率 10Hz
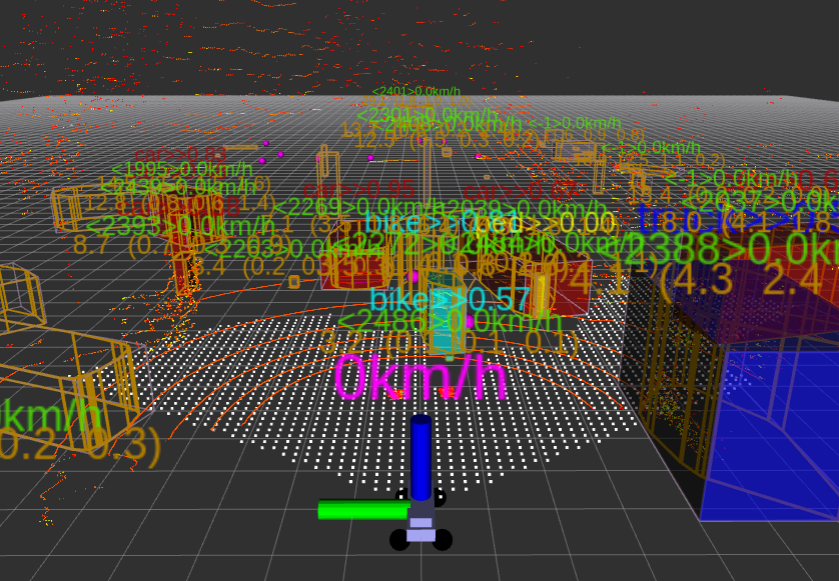
3D 建模环境感知
通过激光扫描可以得到汽车周围环境的3D 模型,运用深度学习+特征识别相融合算法,达到点云聚类、障碍物(行人、车辆、骑行者、卡车、其他)识别功能;识别精度误差<±5cm。
SLAM 加强定位
实时得到的全局地图通过和高精度地图中特征物的比对,实现导航及加强车辆的定位精度,精度达到厘米级。

